1.评分方法
1.1 碰撞点示意图
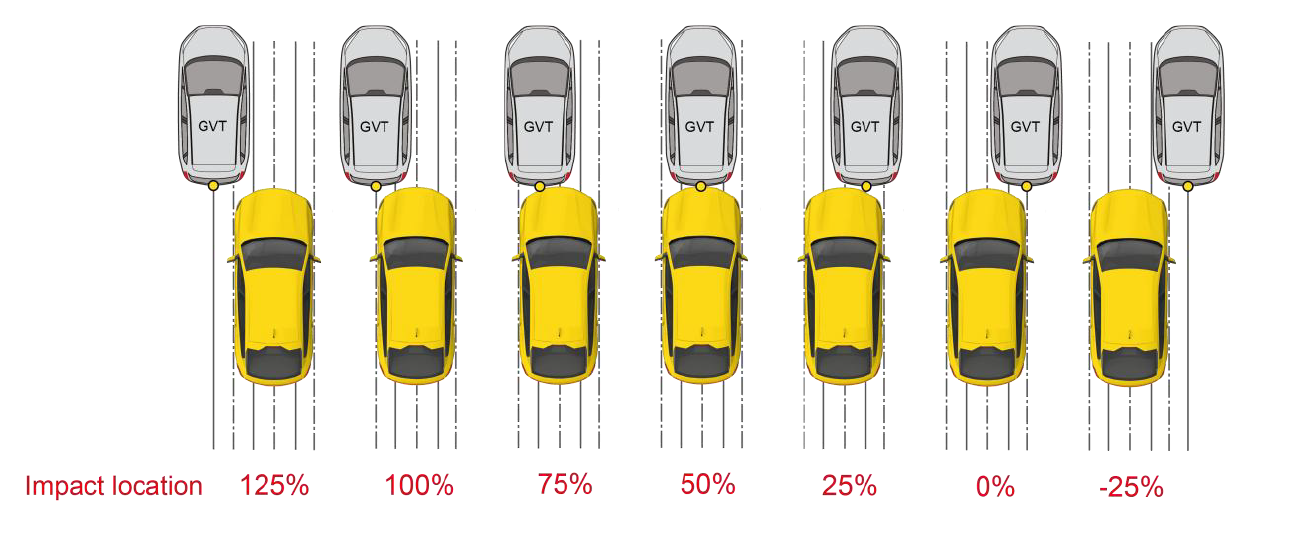
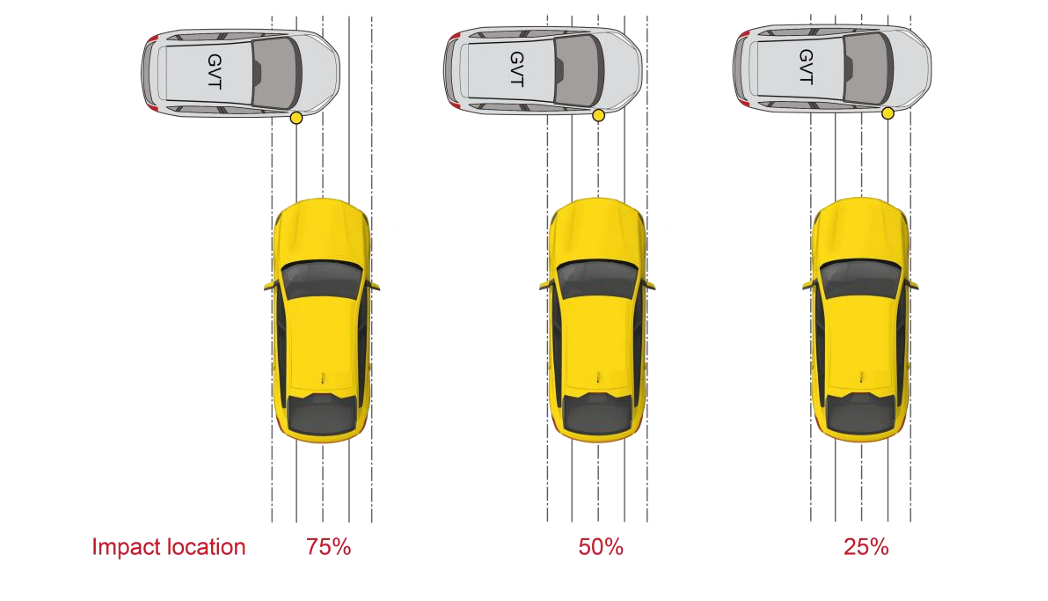
1.1.1 Car-to-Car Rear
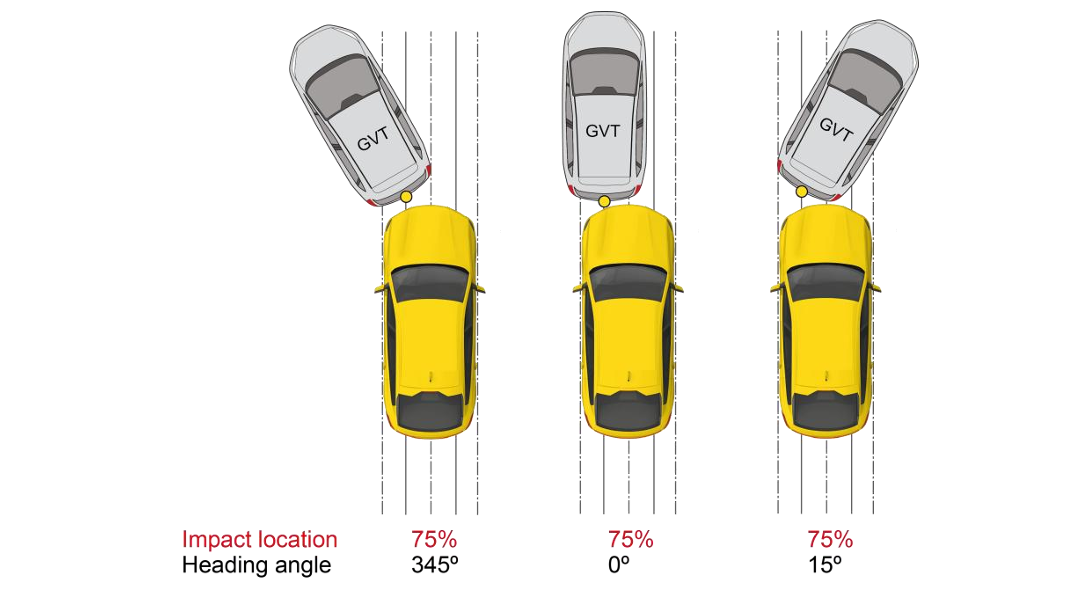
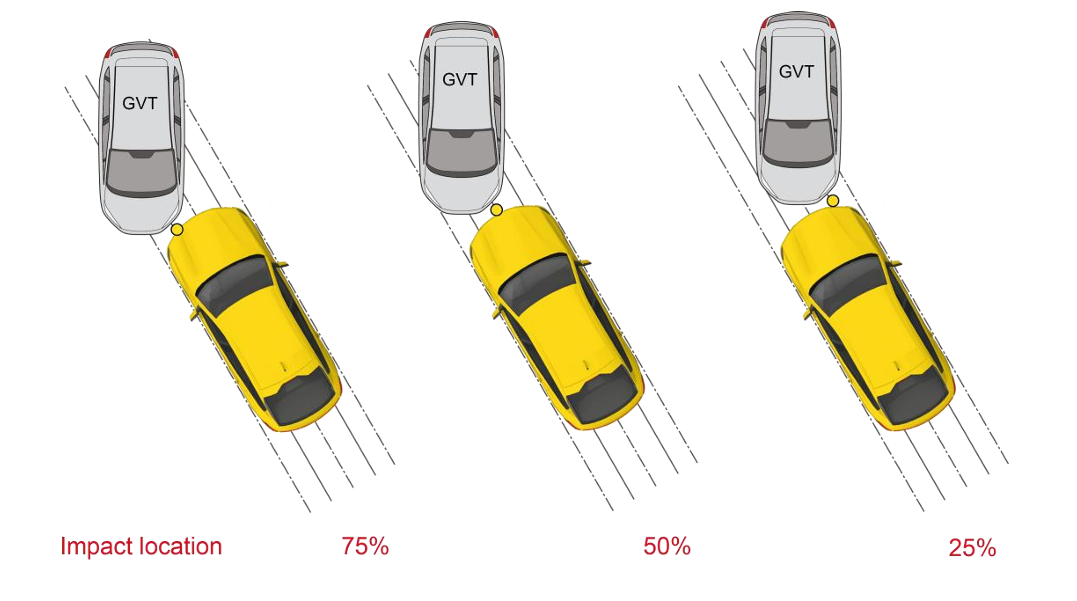
Car-to-car Rear + Heading
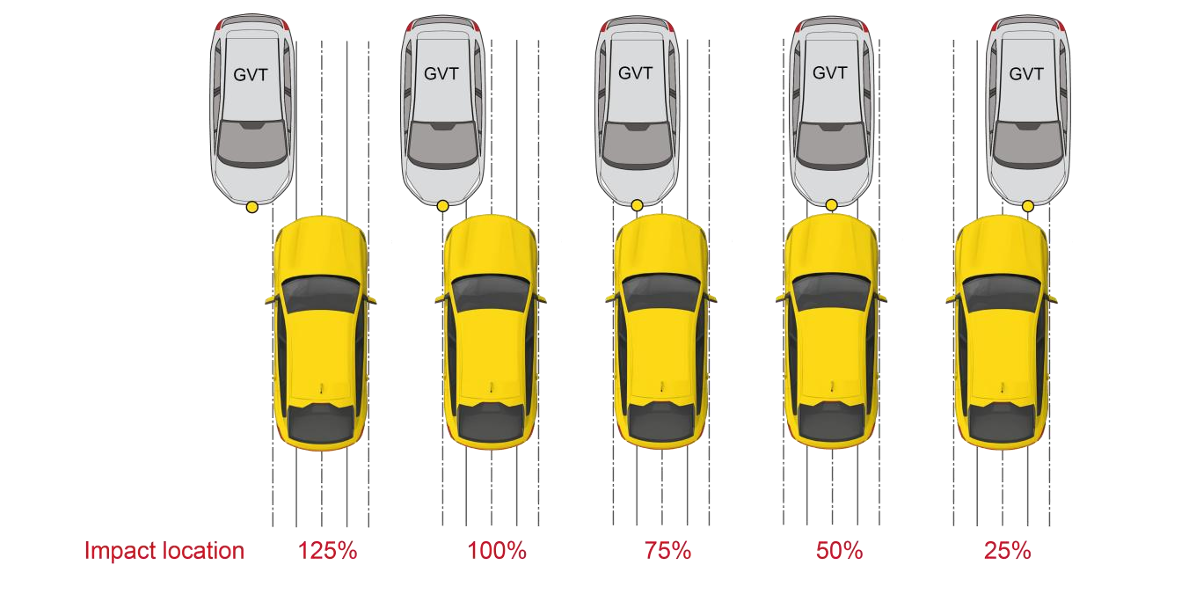
Car-to-Car Front
Car-to-Car Crossing
Car-to-Car Turn Across Path
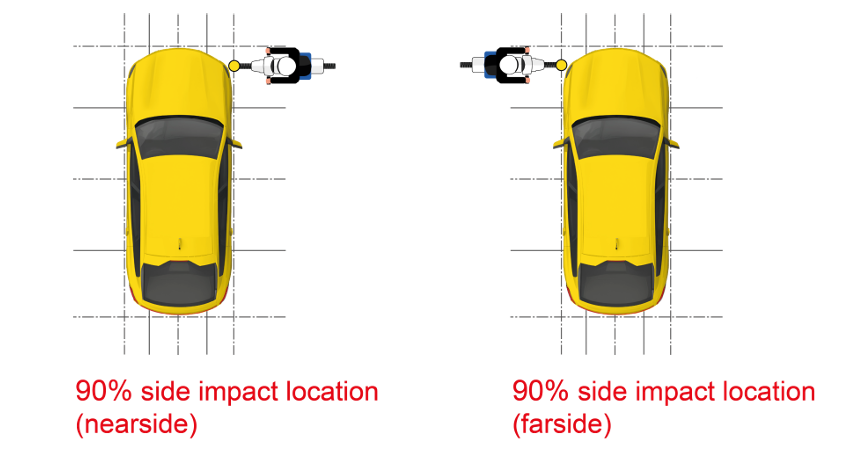
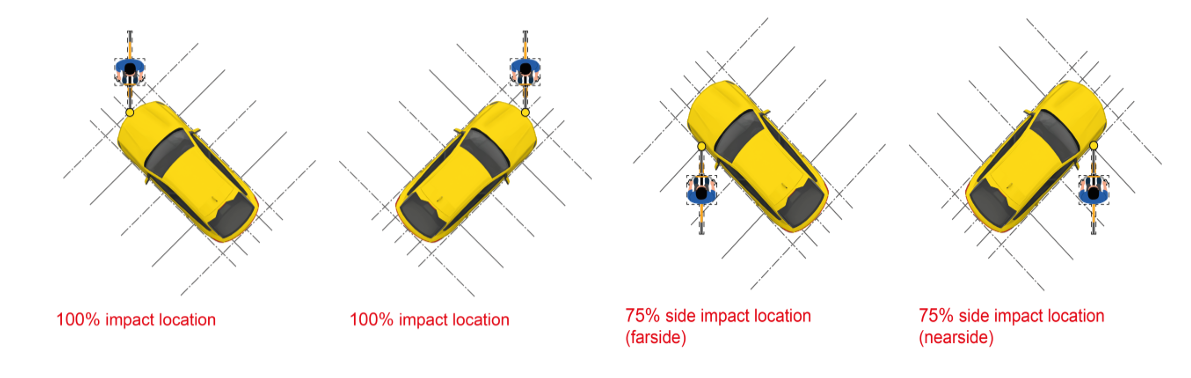
Car-to-PTW Crossing
Car-to-Bicyclist Turning
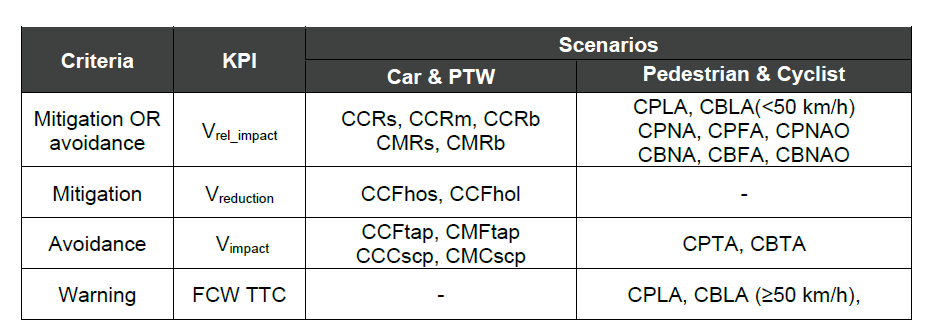
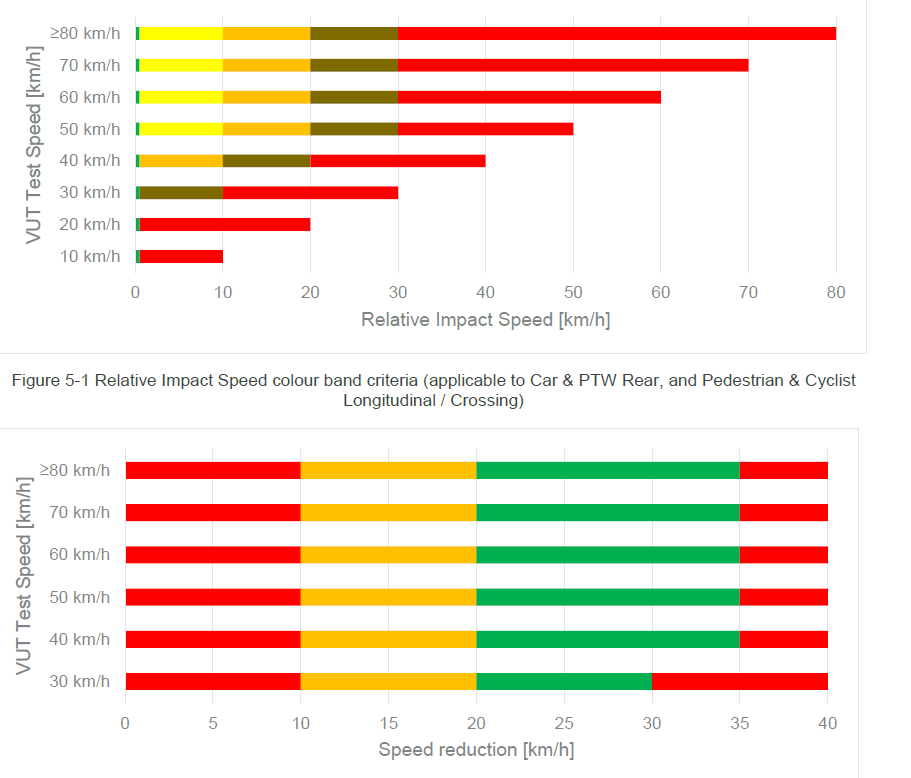
1.2 各场景评分方法

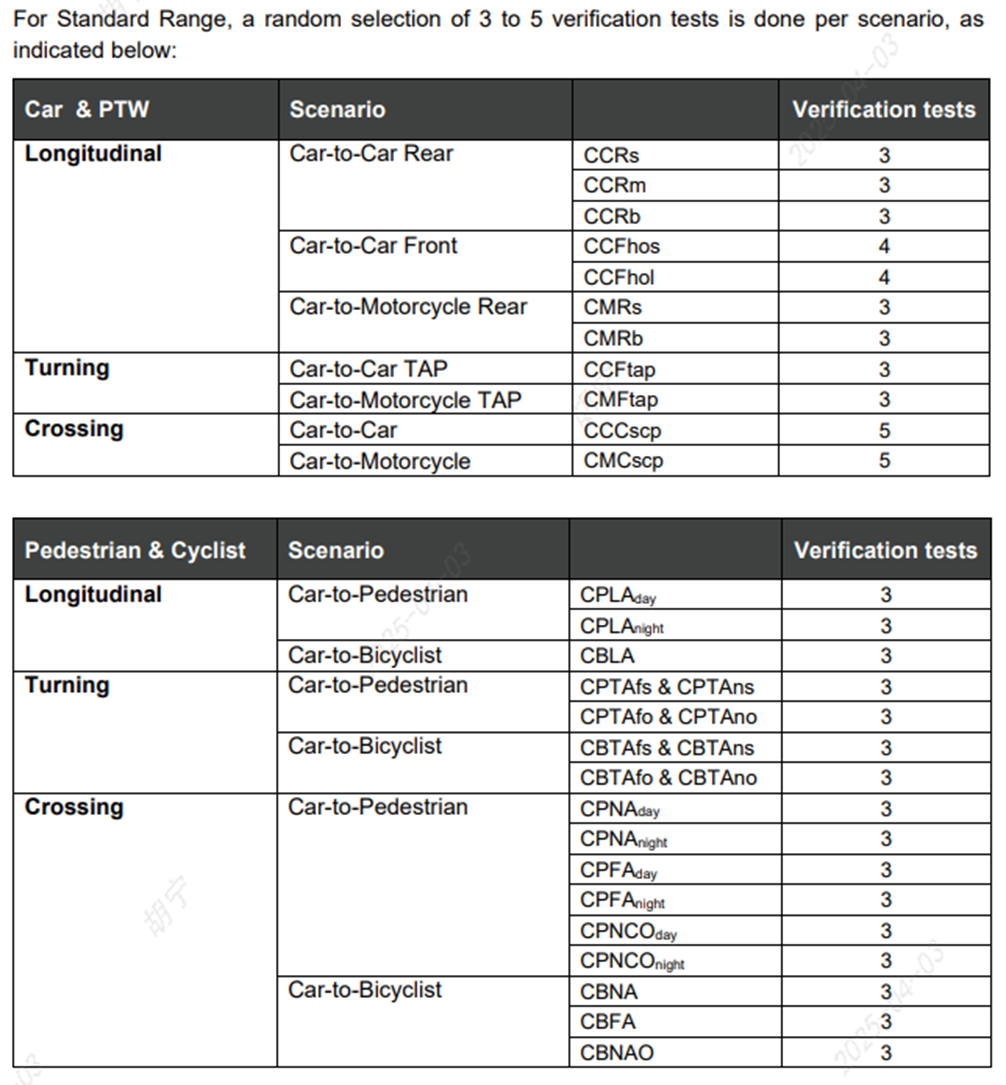
1.3 标准场景验证case
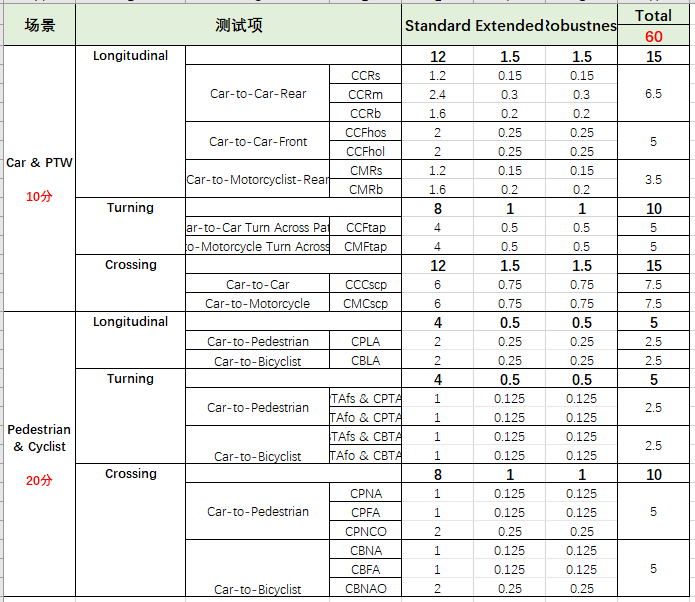
2.评分表
备注:
注释1:AEB和/或 FCW 功能应在每次行程开始时默认开启,且不能通过瞬间单次按下按钮来关闭系统。
注释2:针对标准范围Standard测试,每个场景选择3到5组工况进行验证测试,见第一节评分方法。
注释3:针对扩展范围Extended测试,每个场景随机选择固定数量验证测试2次。
注释4:针对鲁棒性层Robustness测试,每个场景随机选择一个层级进行测试。
注释5:要想获得拓展范围Extended的得分计算,标准测试Standard范围至少需要获得可用总分的50%。
注释6:要想获得鲁棒性层Robustness的得分计算,标准测试Standard范围至少需要获得可用总分的50%。
注释7:鲁棒性测试中分为决策与控制、感知两类。决策与控制类包括驾驶员预碰撞输入、目标速度、加速度、初始位置偏移、轨迹/航向的微小变化;感知类涵盖目标类型、外观、环境变化(恶劣天气、夜间照明、眩光、基础设施/杂物、遮挡/障碍物布局变化)。在不同场景下,各鲁棒性层级的评估方式不同,部分通过验证测试,部分基于现场数据。
3.详细测试项
3.1 Car & PTW
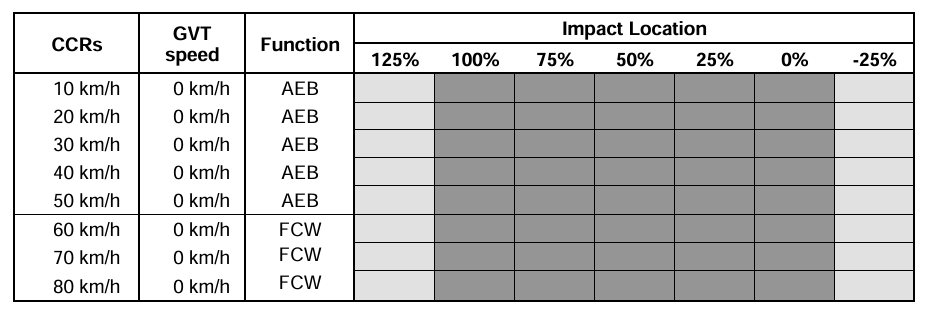
3.1.1 CCRs
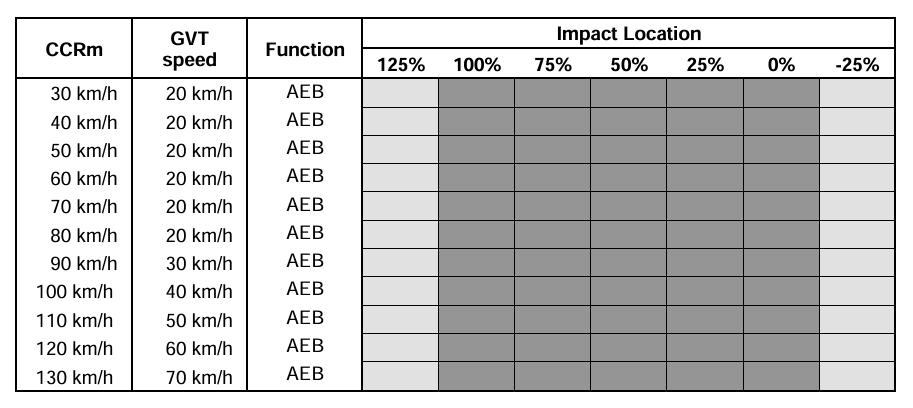
3.1.2 CCRm
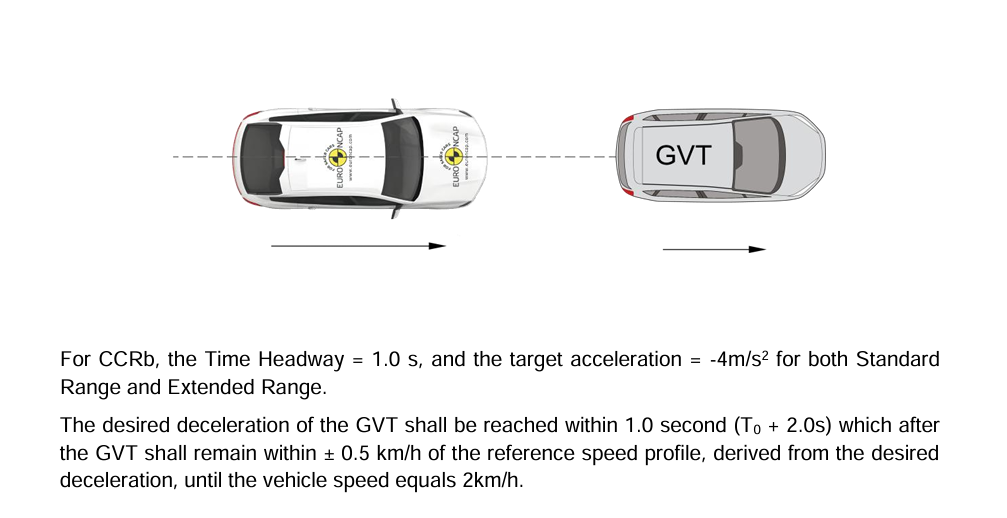
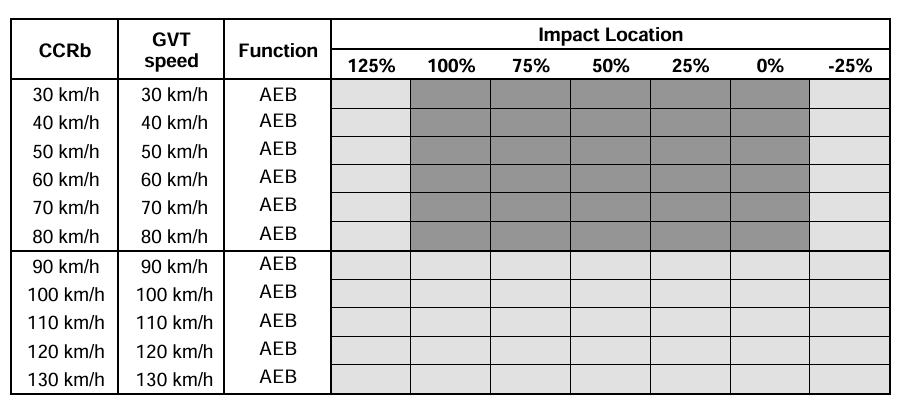
3.1.3 CCRb
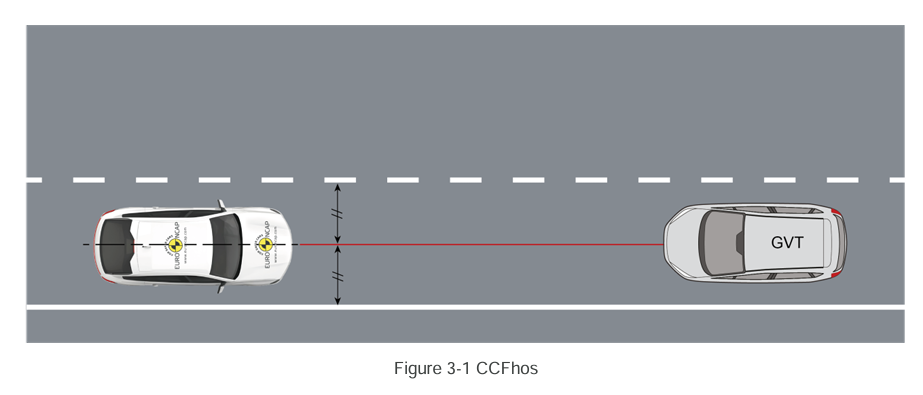
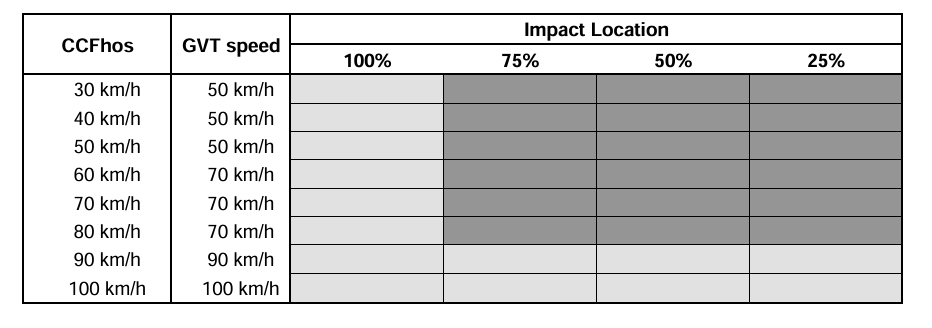
3.1.4 CCFhos
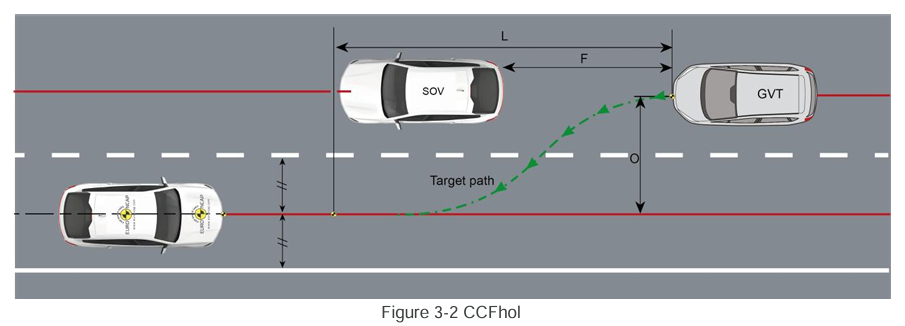
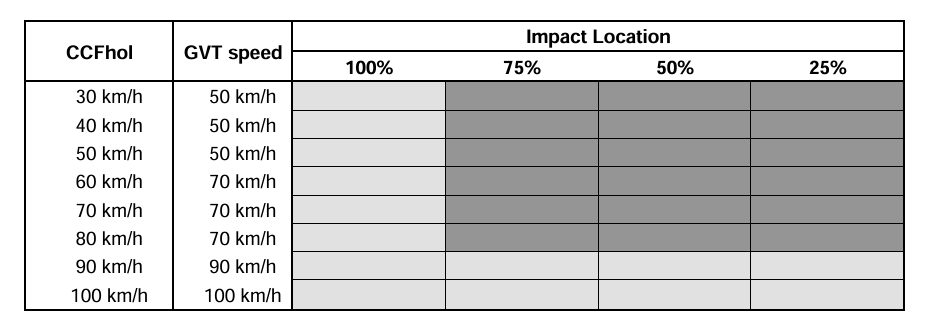
3.1.5 CCFhol
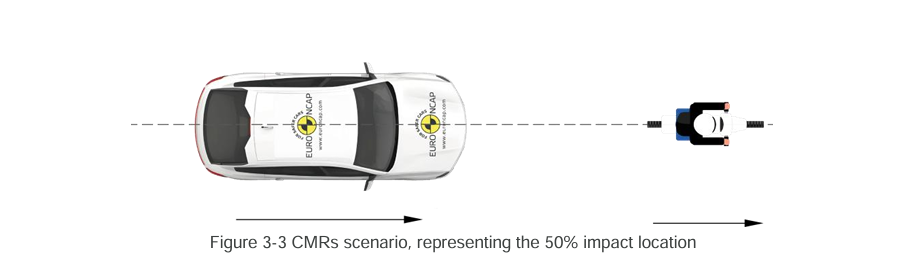
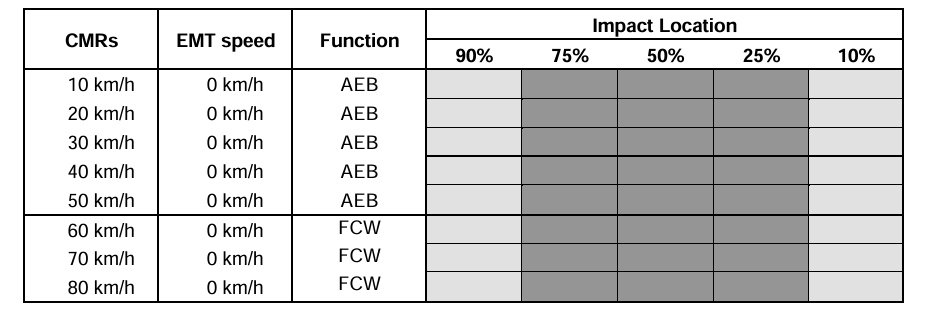
3.1.6 CMRs
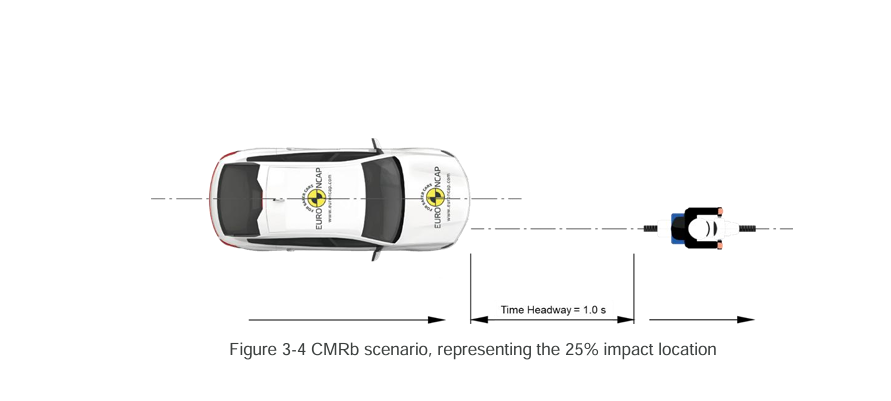
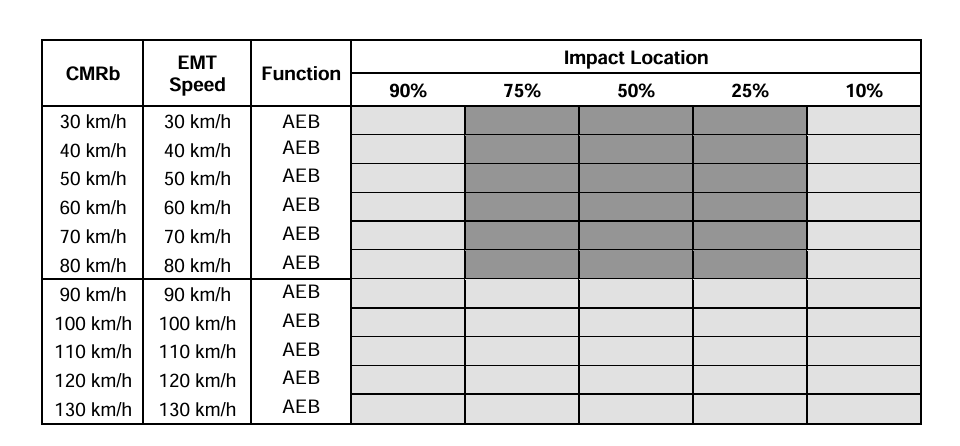
3.1.7 CMRb
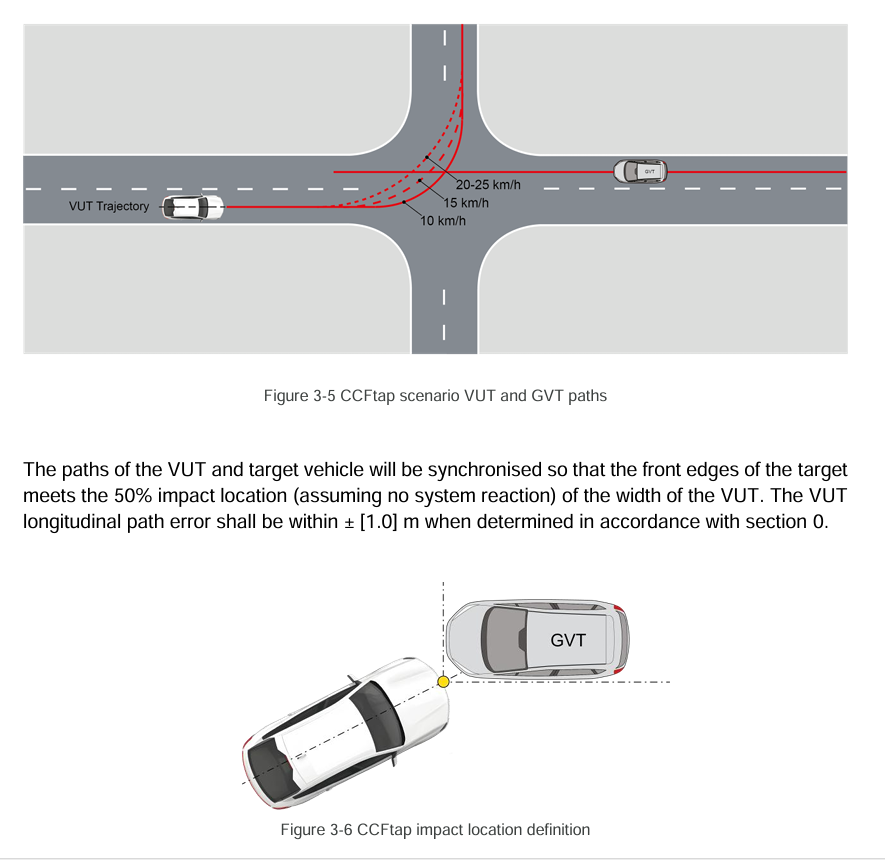
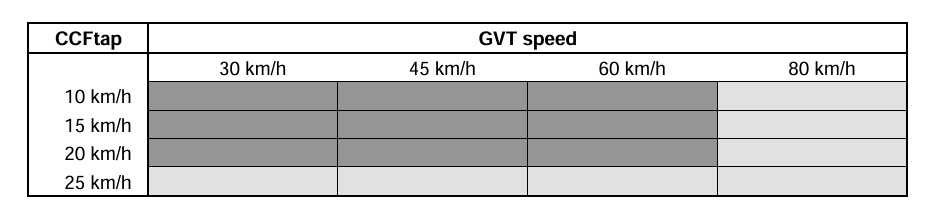
3.1.8 CCFtap
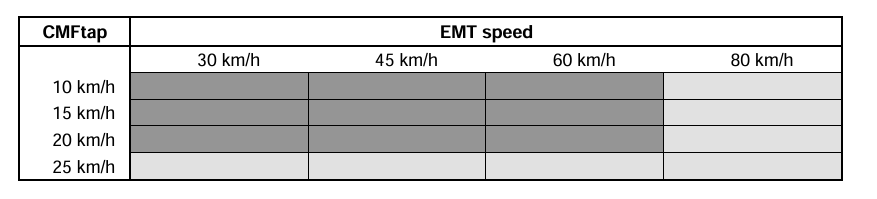
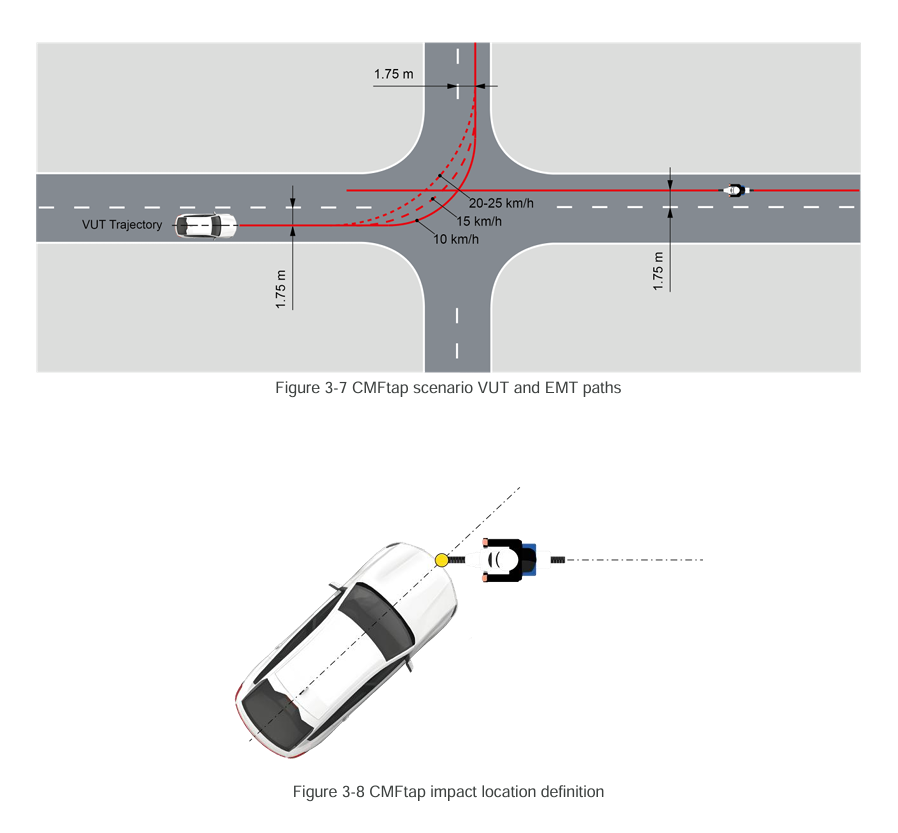
3.1.9 CMFtap
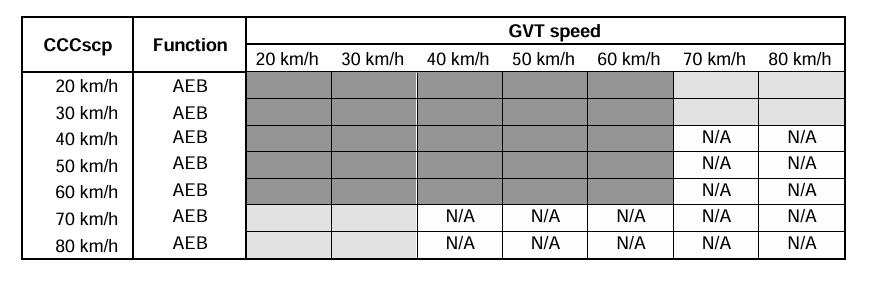
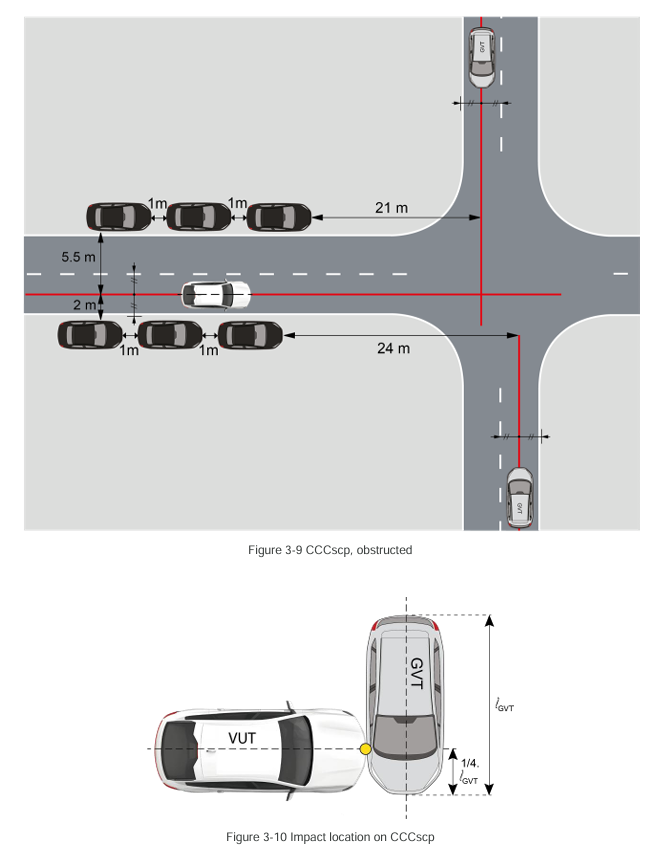
3.1.10 CCCscp
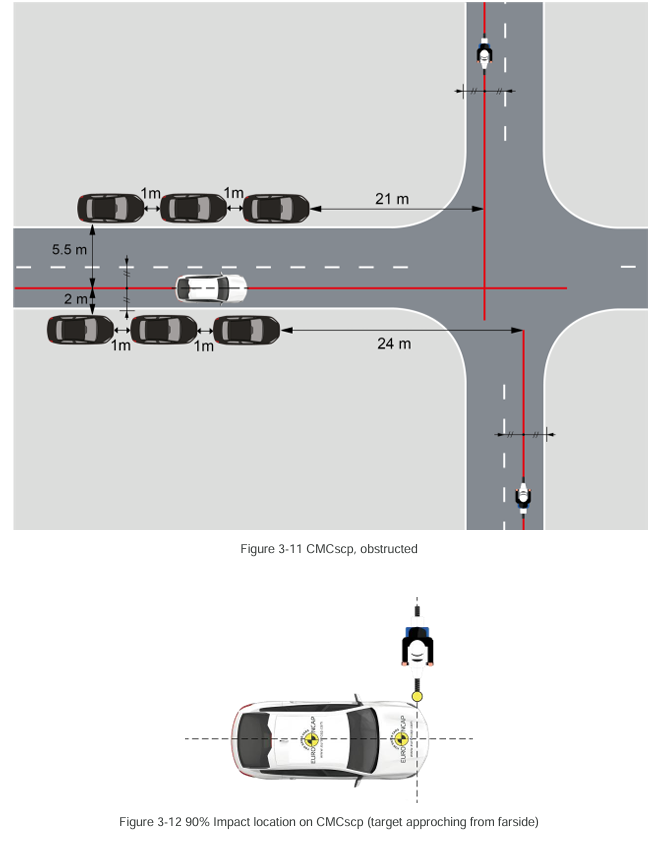
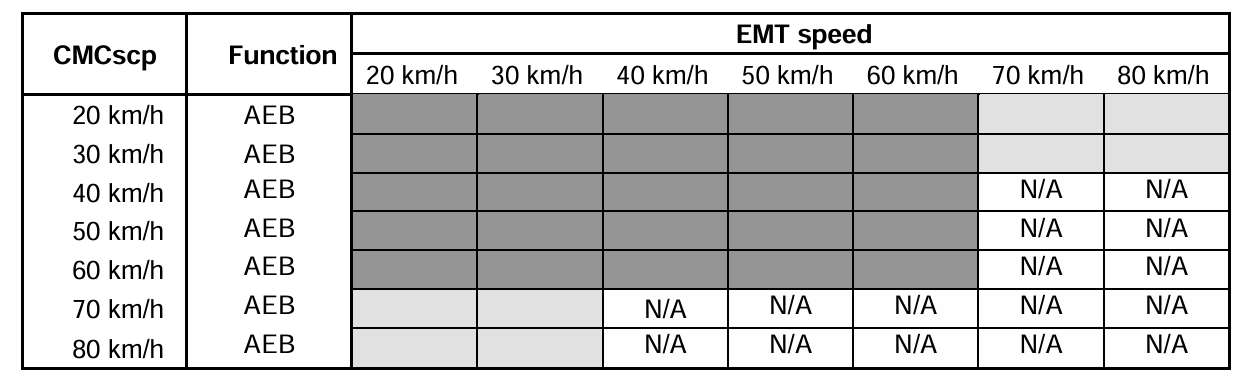
3.1.11 CMCscp
3.2 Pedestrian & Cyclist
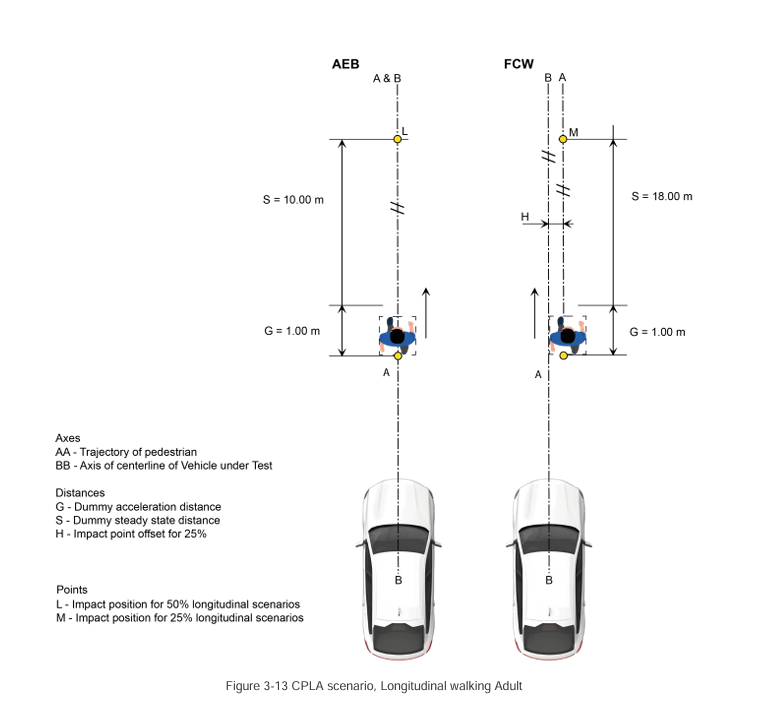
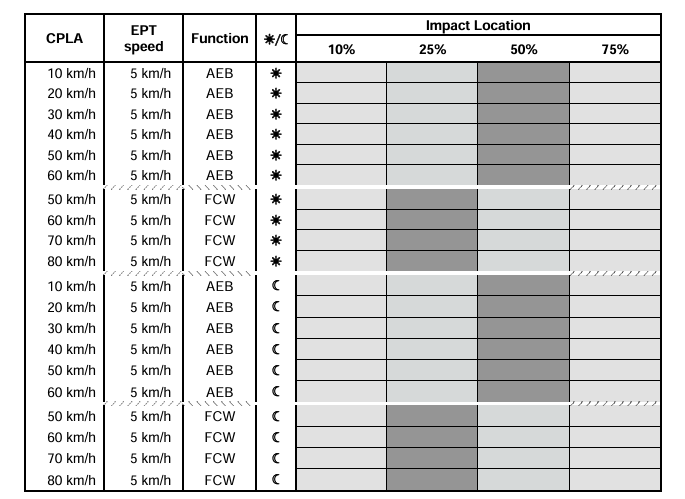
3.2.1 CPLA
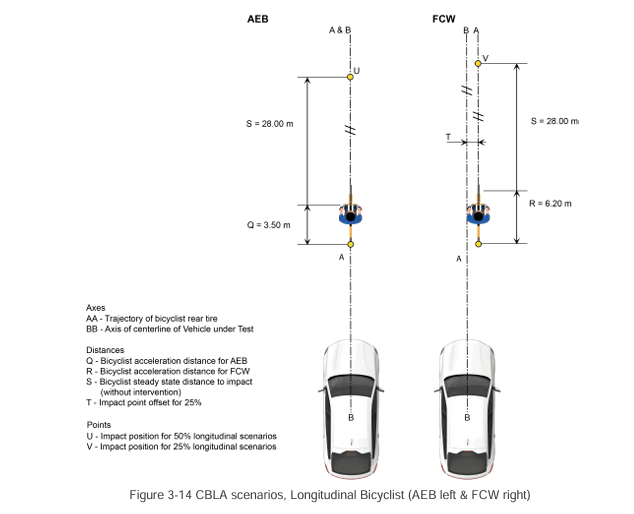
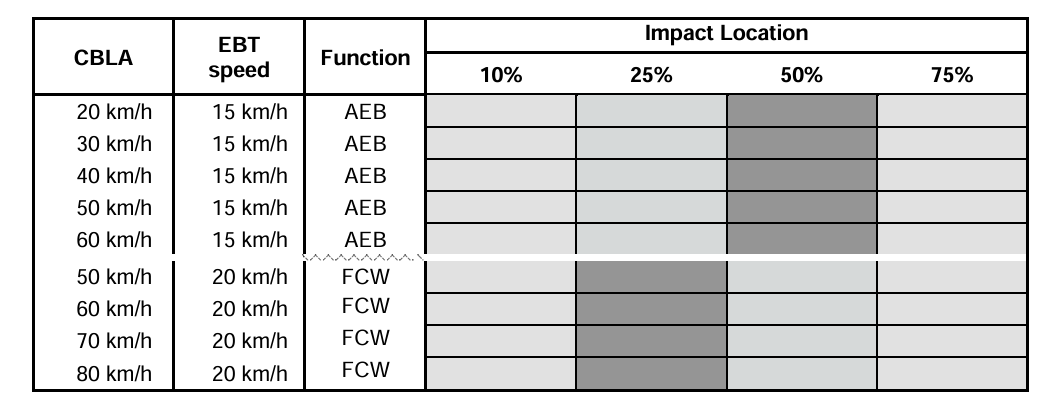
3.2.2 CBLA
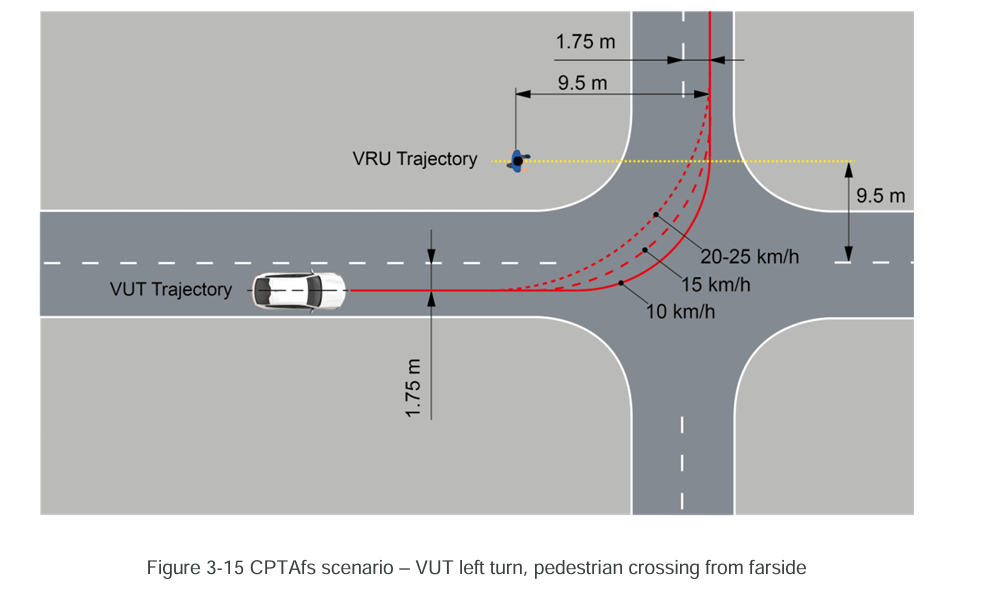
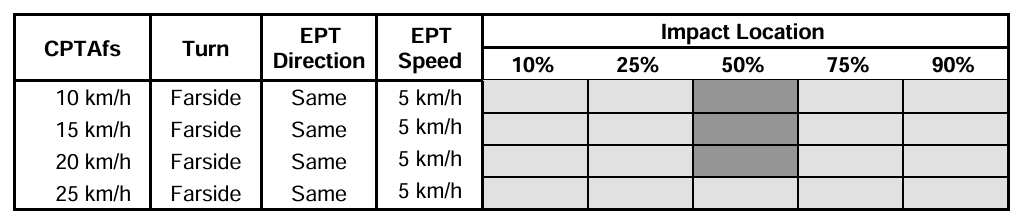
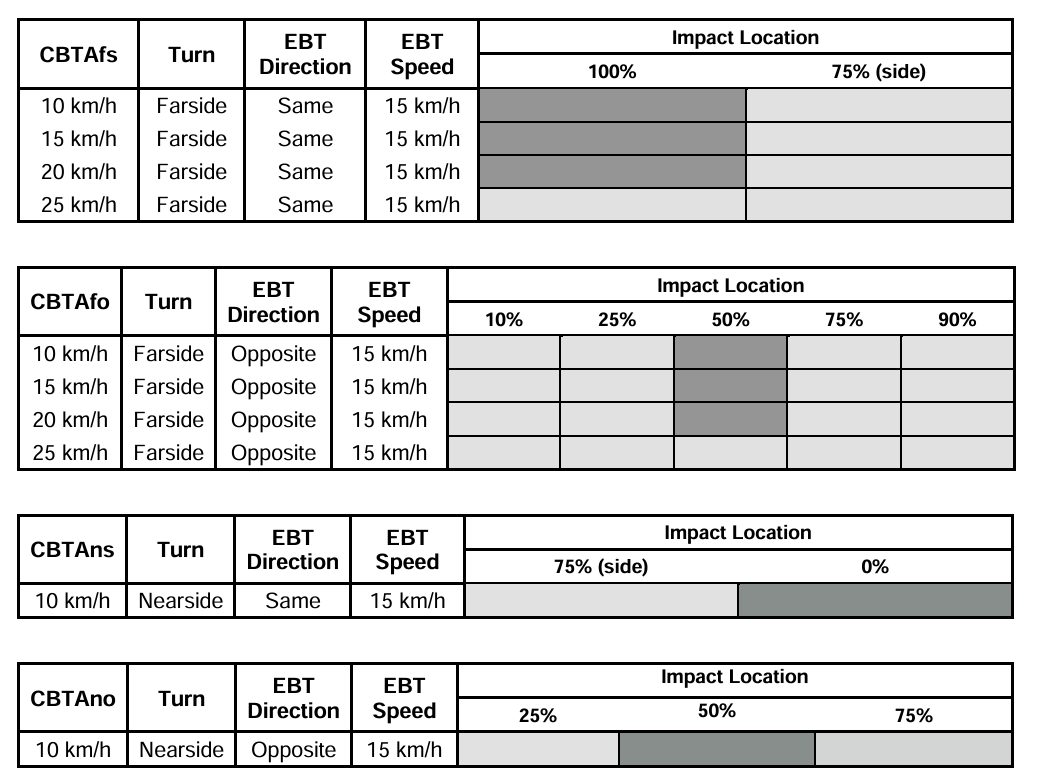
3.2.3 CPTAfs
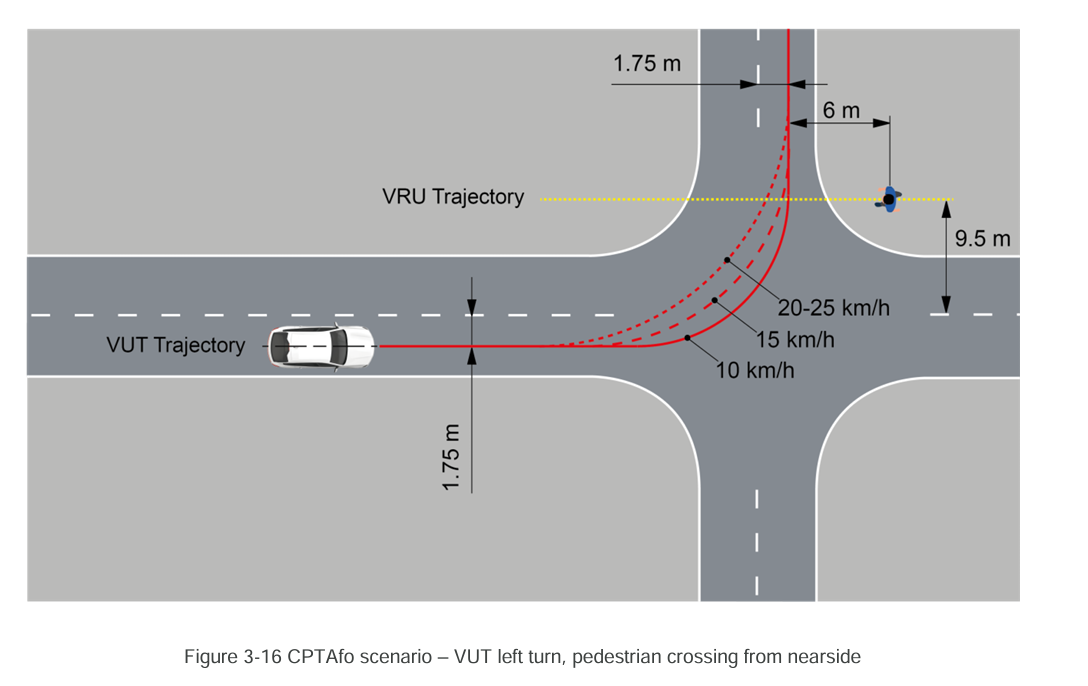
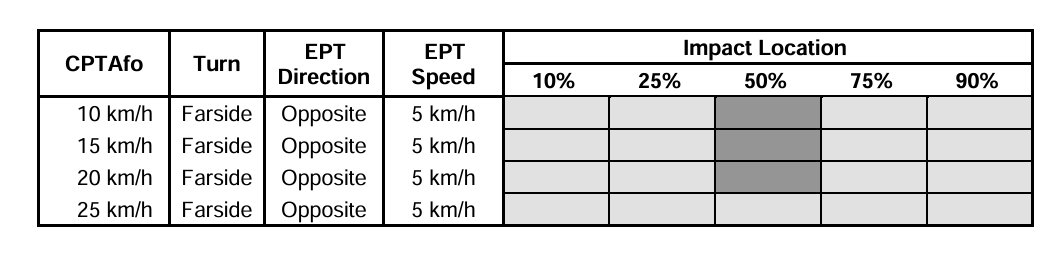
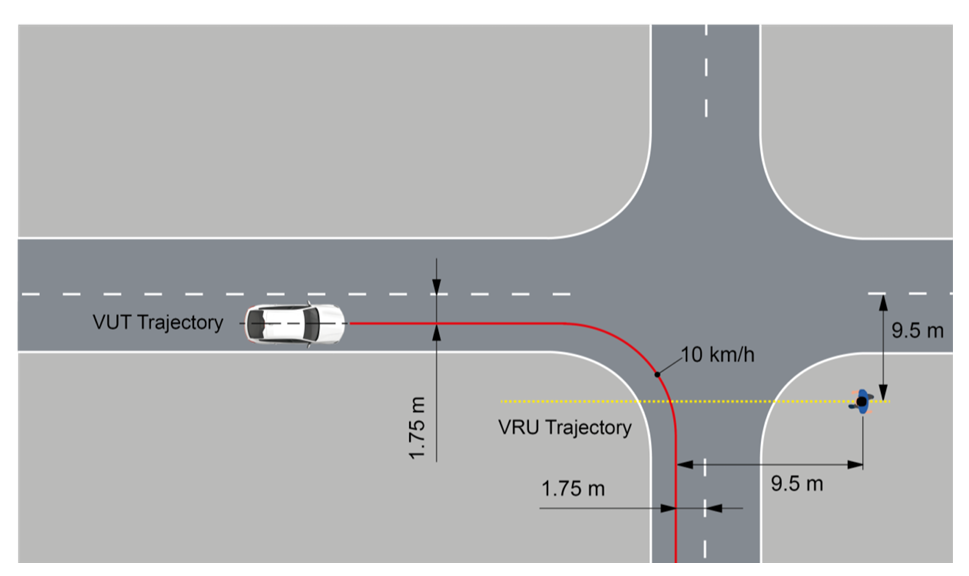
3.2.4 CPTAfo
3.2.5 CPTAno

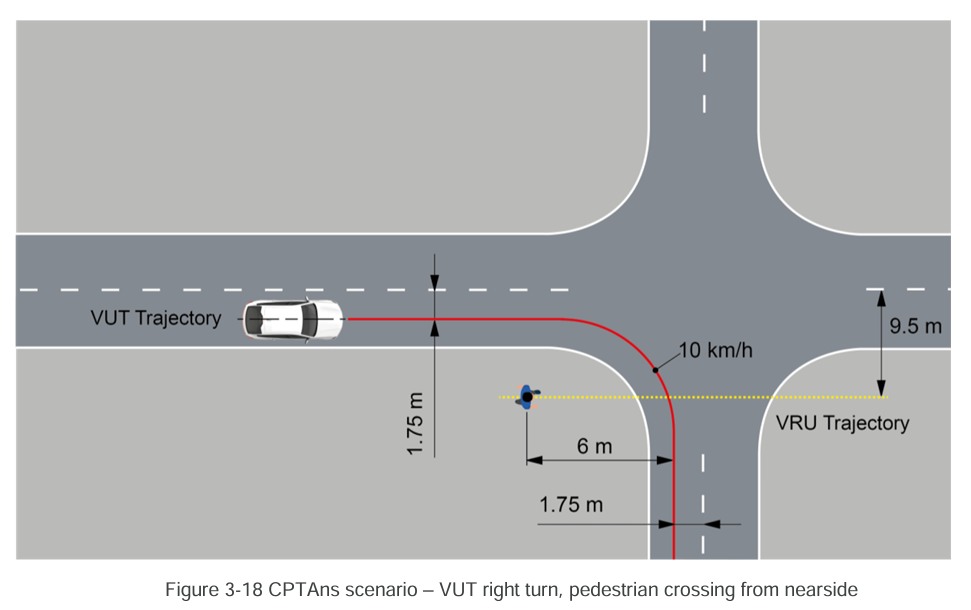
3.2.6 CPTAns

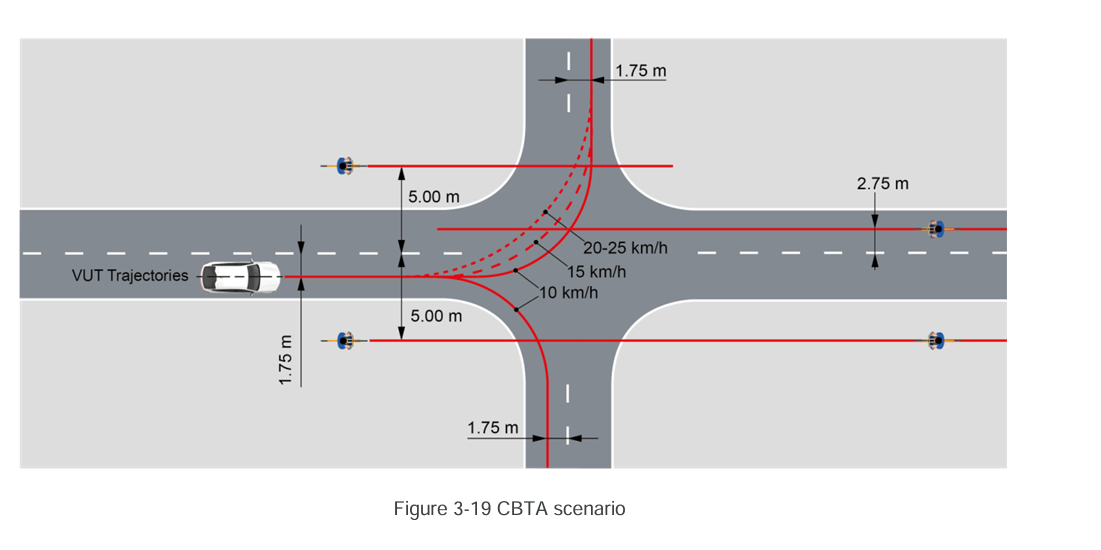
3.2.7 CBTA
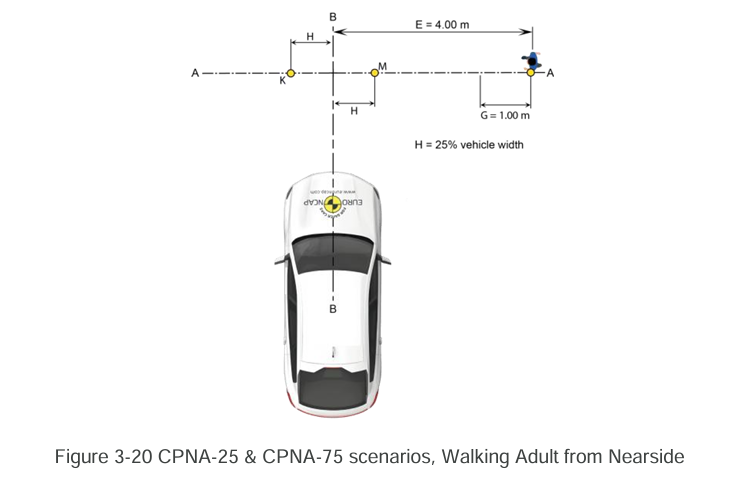
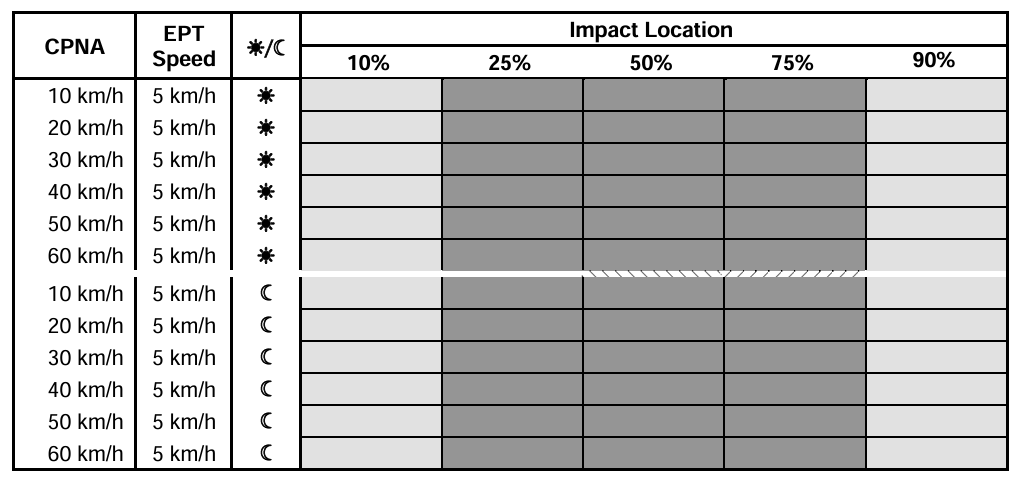
3.2.8 CPNA
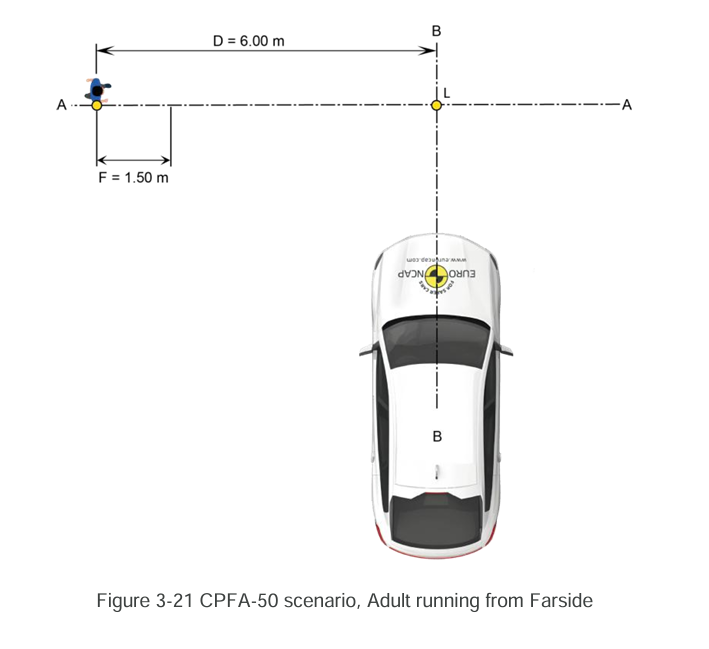
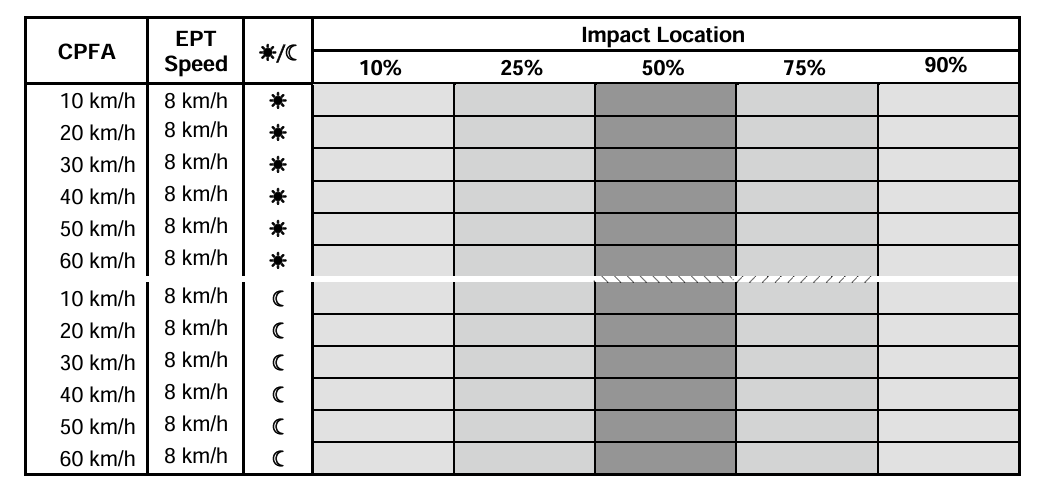
3.2.9 CPFA
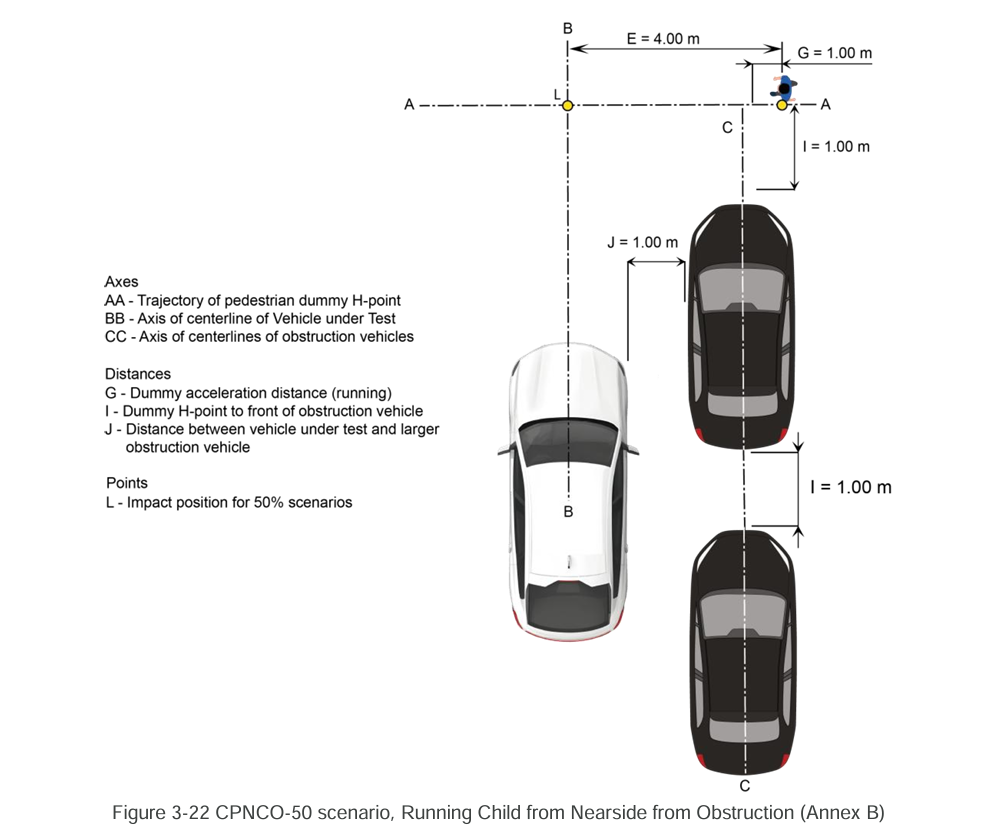
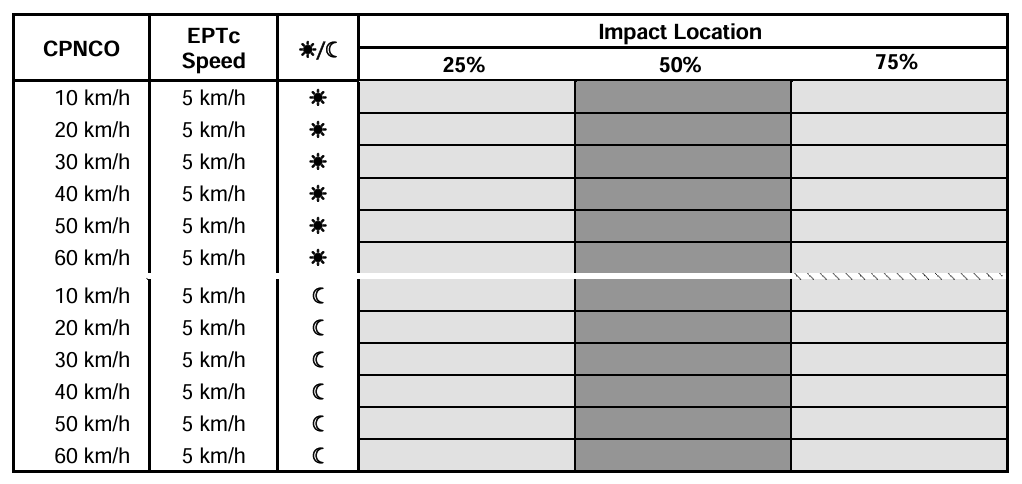
3.2.10 CPNCO
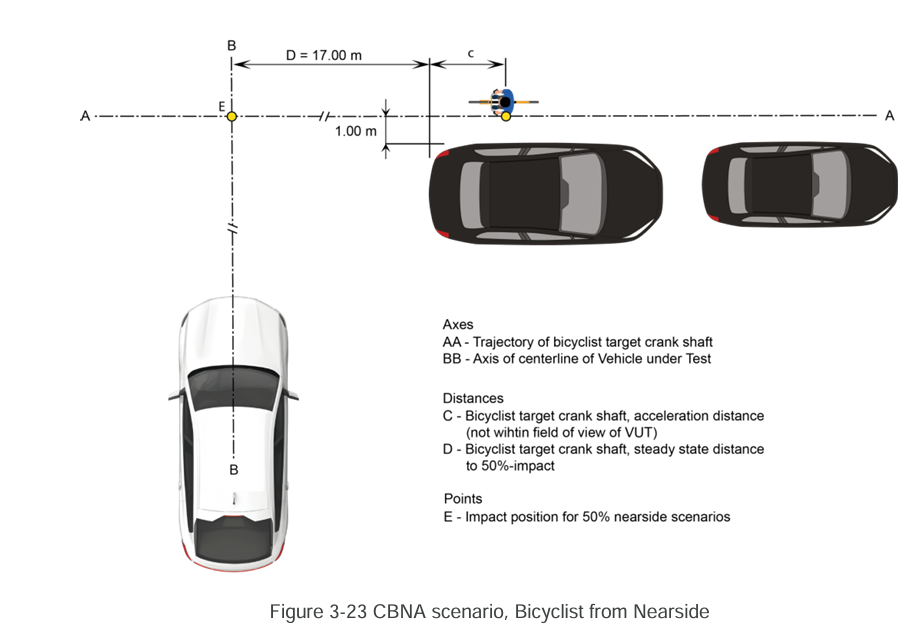
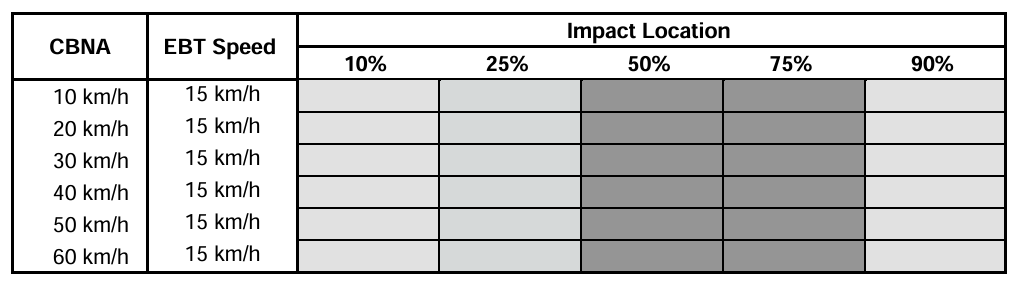
3.2.11 CBNA
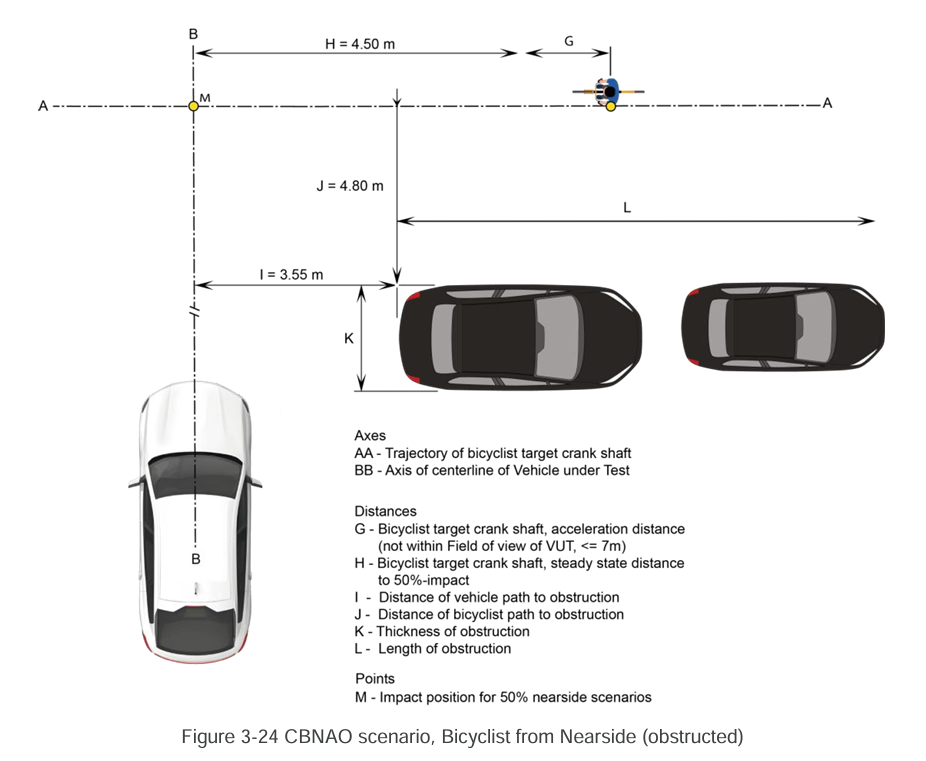
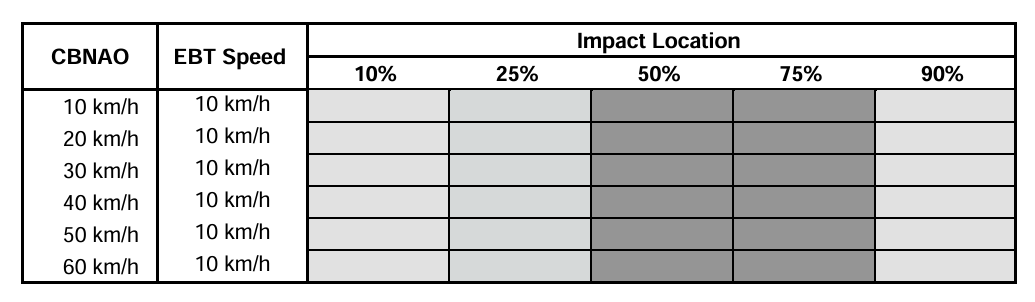
3.2.12 CBNAO
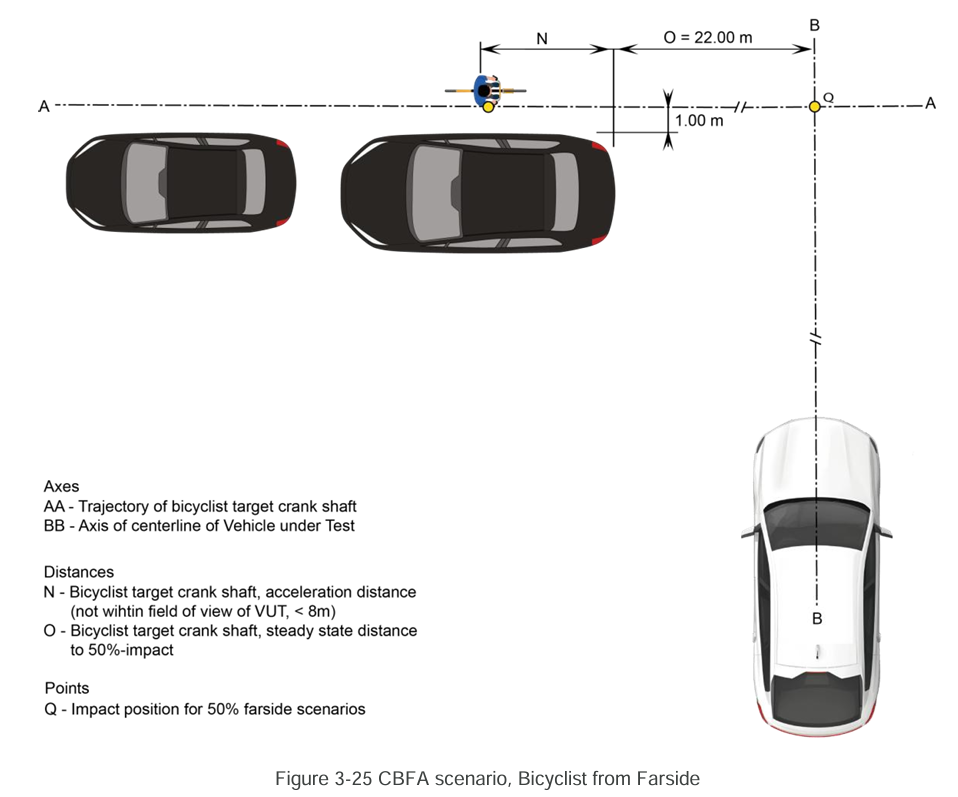
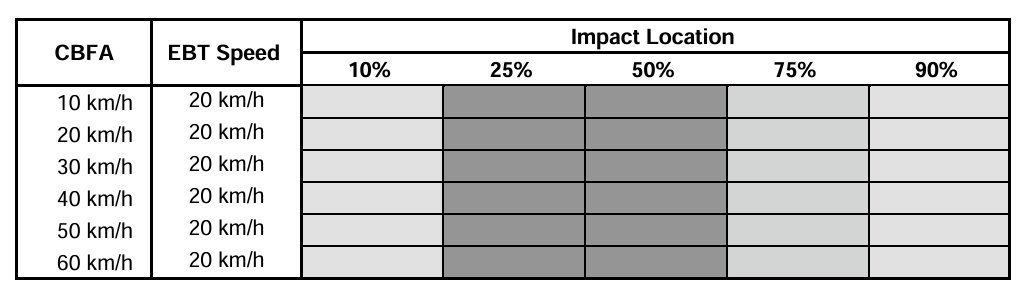
3.2.13 CBFA


评论区